

NVH und Fahrzeugakustik
Der Fahrkomfort und die Fahrzeugakustik spielen in der Fahrzeugentwicklung eine immer wichtigere Rolle. So wird einerseits die qualitative Beurteilung eines Fahrzeugs maßgeblich von dem akustischen und schwingungstechnischen Verhalten beeinflusst, andererseits gelten weltweit immer strengere Grenzwerte für Schallemissionen hinsichtlich Lärmschutz.
Um die Entwicklung von Fahrzeugen diesbezüglich zu unterstützen bedarf es einer Berücksichtigung des NVH-Verhaltens in früheren Phasen des Produktentwicklungsprozesses. Dazu müssen vor allem die Wechselwirkungen zwischen Teilsystemen und dem Gesamtsystem, sowie deren Wirkung auf den Menschen untersucht und quantifiziert werden.
Wir forschen daher an effizienten Methoden und Prozessen, die eine ganzheitliche und prozess-begleitende Validierung hinsichtlich Akustik und Schwingungen realisieren.
Forschungsschwerpunkte
Forschungsschwerpunkte sind Methoden und Prozesse zur Entwicklung und Validierung von nutzerorientierten Mobilitätssystemen. Der Fokus liegt dabei auf der durchgängigen Integration von Simulation und Test für den Bereich NVH, sowie der Konzipierung von Validierungsumgebungen. Wesentliche Themen sind:
- NVH (Gesamtfahrzeug und Komponenten)
- Komfortobjektivierung, Auswertungsmethoden und Validierung der Fahrzeuginnen- und Fahrzeugaußenakustik
- Simulierte Vorbeifahrt: Fahrzeugaußengeräuschhomologation
- Suggestives Sounddesign: Nutzung eines aktiven Sounddesigns zur Beeinflussung des Fahrverhalten
- AVAS-Warngeräusche: Objektivierung und Prädiktion der subjektiven Wahrnehmung von Acoustic Vehicle Alerting System (AVAS) Warngeräuschen
- Vibroakustische Metamaterialien (VAMM)
- NVH Verhalten von Brennstoffzellen
Systeme
Methoden und Prozesse der NVH erforschen wir sowohl anhand technischer Gesamtsysteme als auch ausgewählter Teilsysteme. Dafür stehen uns unmittelbar am Institut Powertools und Antriebssysteme zur Verfügung. Darüber hinaus erforschen wir in Zusammenarbeit mit unseren Partnern ein breites Spektrum unterschiedlicher Systeme, das von der Automobilindustrie und ihren Zulieferern bis hin zum Sondermaschinenbau reicht. Im Forschungsfeld "NVH und Fahrzeugakustik" liegt der Fokus für Entwicklungs- & Validierungsumgebungen auf:
- Manuell gesteuerte und (teil-) automatisierte Fahrzeuge
- System "(automobiler) Antriebstrang"
- konventionelle Antriebssysteme
- elektrische, hybride und leistungsverzweigte Antriebssysteme
- Teilsysteme und Komponenten
- Getriebe und Getriebetopologien
- Nebenaggregate (Klimakompressor, Kühl- und Schmiermittelpumpen,...)
- Komfort-Aktuatoren (Fensterheber, el. Parkbremse, Lenkunterstützung,...)
- Systeme zur Schwingungsberuhigung
- Kupplungssysteme
- Abgassysteme
- Active Sounddesign (ASD)
- AVAS Sounddesign
Methoden
Im Forschungsfeld werden unter anderem zu folgenden Themenschwerpunkten im Kontext NVH unter Berücksichtigung systemischer Einflussfaktoren Entwicklungs- & Validierungsmethoden eingesetzt und entwickelt:
- Entwicklung bedarfsgerechter Produkte und zugehöriger Validierungsumgebungen mit Fokus auf NVH
- Komfortobjektivierung für unterschiedliche Stakeholder
- Analyse und Berücksichtigung von Kundenbedürfnissen von Endnutzern, Fahrzeugherstellers & Zulieferers (Skalierungen)
- Außengeräuschhomologation bei der simulierten Vorbeifahrt
- Ermittlung des akustischen Zentrums
- Beeinflussung des Fahrverhaltens über Active Sounddesign
- Prädiktion der subjektiven Wahrnehmung (Annoyance/Pleasantness) von AVAS Warngeräuschen
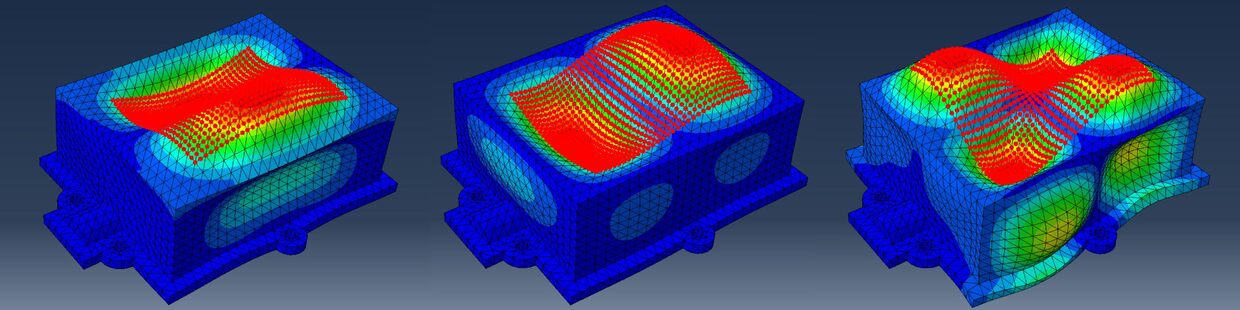
- Vibroakustische Simulationen (FE)
- Auralisierung mittels XR-Anwendungen
- Einsatz des IPEK-XiL-Framework zur durchgängigen Validierung technischer Systeme
- Einsatz von NVH Methoden nach Standards: Transferpfadanalysen, Modalanalysen, Schallleistungsmessungen, Vorbeifahrtmessungen, ...
Prozesse
Auf der Grundlage der Theorie der NVH erforschen und gestalten wir für die Produktentwicklung Entwicklungs- & Validierungsprozesse, beispielsweise:
- Prozesse zur Analyse und Optimierung des NVH-Verhaltens
- Prozesse für Akustikmessungen innerhalb und außerhalb des Fahrzeugs (z.B. Kunstkopfmessungen, simulierte Vorbeifahrt)
- Prozesse für Sounddesign
- Prozesse für Objektivierung von Komfort und der subjektiven Wahrnehmung des Menschen
- Prozesse für Benchmarking und Standardisierung
- Prozesse für die Durchführung von reproduzierbaren Fahr- und Rollenprüfstandversuchen
Ausstattung
Praxisorientierte, theoretische und experimentelle Untersuchungen auf unseren Prüfständen oder durch mobil einsetzbare Messtechnik:
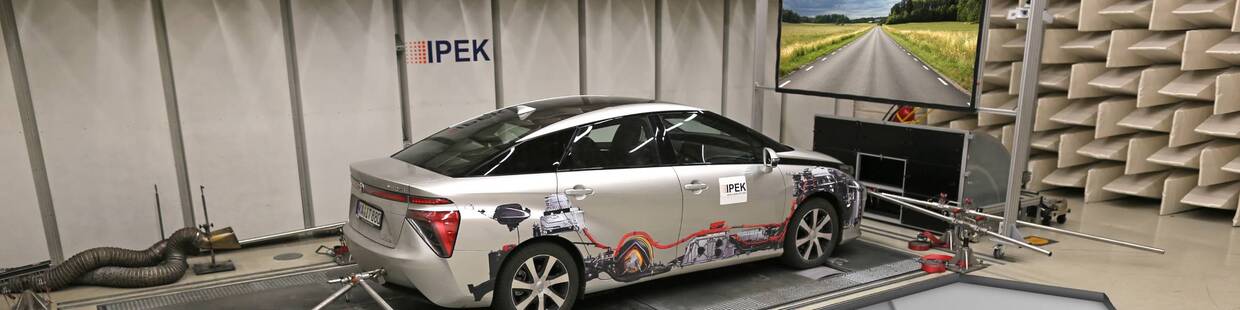
- Akustikrollenprüfstand: 2-Achs-getriebener Rollenprüfstand mit Vehicle-in-the-Loop-Technologie im Halbfreifeldraum (untere Grenzfrequenz von 63Hz). Die Informationsbroschüre können Sie hier downloaden.
- Fahrroboter (SAP 2000)
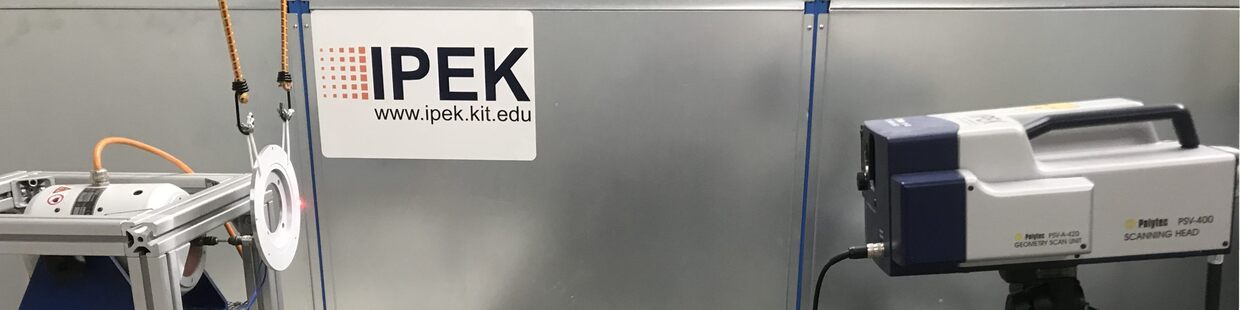
- 3D-Laser-Scanningvibrometer (PSV 3D) zur berührungslosen und rückwirkungsfreien Erfassung 3-dimensionaler Schwingungen von Oberflächen
- 3D-Schallintensitätssonde (LMS SoundBrush)
- Kunstkopf, Uni- und Triax-Beschleunigungssensoren, Freifeld-Mikrofone, 40-Kanal Front-End und AFT TORnado
- Head Acoustics ArtemiS SUITE
- Akustische Kamera (HEAD VISOR)
- IPEK-Fahrsimulator mit Force-Feedback-Pedal
- Diverse Versuchsfahrzeuge (konventionell, hybridisch, elektrisch, AVAS-Sounddesign)
Weitere Ausstattung des Instituts finden Sie hier.
Bachelor- / Masterarbeiten
Aktuelle Bachelor- und Masterarbeiten im Forschungsfeld NVH und Fahrzeugakustik finden sie hier.
Kontakt

 +49 721 608 42995
+49 721 608 42995 tobias gohlke ∂does-not-exist.kit edu
tobias gohlke ∂does-not-exist.kit edu
Leiter der Forschungsgruppe
NVH - Noise Vibration Harshness
Standort Campus Ost
Ausgewählte Veröffentlichungen im Forschungsfeld
Hacker, T.; Bause, K.; Lampert, M.; Gohlke, T.; Ott, S.
2025. VDI-Fachtagung Kupplungs-Bremssysteme für mobile und stationäre Anwendungen, VDI-Wissensforum
Bopp, M. J. R.
2024, Juni 19. Karlsruher Institut für Technologie (KIT). doi:10.5445/IR/1000171679
Petersen, M.; Deml, B.; Albers, A.
2024. Acoustics, 6 (2), 541–567. doi:10.3390/acoustics6020029
Petersen, M.; Yüksel, D.; Albers, A.
2024. Acoustics, 6 (2), 386–407. doi:10.3390/acoustics6020021
Petersen, M.; Zaimovic, M.; Albers, A.
2023. INTER-NOISE and NOISE-CON23 Congress and Conference Proceedings, InterNoise23, Chiba, Japan, 4689–4700, Institute of Noise Control Engineering (INCE). doi:10.3397/IN_2023_0666
Petersen, M.; Düser, T.; Albers, A.
2023. doi:10.5445/IR/1000170068
Bopp, M.; Albers, A.
2023. INTER-NOISE and NOISE-CON Congress and Conference Proceedings, InterNoise22, Glasgow, Scotland, Pages 3999-5001, 4420–4430, Institute of Noise Control Engineering of the USA (INCE-USA). doi:10.3397/IN_2022_0632
Nan, Z.; Behrendt, M.; Bause, K.; Albers, A.; Wei, X.; Ma, T.; Lin, W.; Zuo, S.
2022. Energy Conversion and Management, 269, Art.-Nr.: 116109. doi:10.1016/j.enconman.2022.116109
Bopp, M.; Albers, A.
2022, März 23. 48. Jahrestagung für Akustik (DAGA 2022), Stuttgart, Deutschland, 21.–24. März 2022
Weber, Y.; Albers, A.
2022. Internoise, 21.-24. August 2022, Glasgow
Nan, Z.; Behrendt, M.; Lu, M.; Petersen, M.; Albers, A.
2021. INTER-NOISE and NOISE-CON Congress and Conference Proceedings, InterNoise21, Washington, D.C., USA, pages 2949-3943, pp. 3720-3730(11), 2949–3943. doi:10.3397/IN-2021-2501
Bopp, M.; Joerger, A.; Behrendt, M.; Albers, A.
2021. INTER-NOISE and NOISE-CON Congress and Conference Proceedings, 263 (4), 2708–2723. doi:10.3397/IN-2021-2211
Gohlke, T.; Bopp, M.; Behrendt, M.; Albers, A.; Wagner, N.; Slavetinsky, S.
2021, Juni 17. NAFEMS Seminar "Integration von Simulation und Test in der Produktentwicklung" (2021), Online, 16.–17. Juni 2021
Bopp, M.; Behrendt, M.
2021. Tagungsband DAGA 2021 - 47. Jahrestagung für Akustik, 15.-18. August 2021, Wien und Online, 113 – 115, Deutsche Gesellschaft für Akustik (DEGA)
Petersen, M.; Behrendt, M.; Etri, M.; Spekker, M.; Lefringhausen, T. J.; Albers, A.
2021. INTER-NOISE and NOISE-CON Congress and Conference Proceedings, InterNoise21: Washington, D.C., USA. Ed.: T. Dare, 1561–1573, Institute of Noise Control Engineering of the USA (INCE-USA). doi:10.3397/IN-2021-1874
Weber, Y.; Behrendt, M.; Gohlke, T.; Albers, A.
2021. INTER-NOISE and NOISE-CON Congress and Conference Proceedings, InterNoise21: Washington, D.C., USA. Ed.: T. Dare, 894–906, Institute of Noise Control Engineering of the USA (INCE-USA). doi:10.3397/IN-2021-1689
Bopp, M.; Behrendt, M.
2020. INTER-NOISE and NOISE-CON Congress and Conference Proceedings, InterNoise20, Seoul, Korea, pages 1-989, 468–482, Institute of Noise Control Engineering of the USA (INCE-USA)
Nan, Z.; Behrendt, M.; Petersen, M.; Albers, A.
2020. Internoise 2020
Albers, A.; Bopp, M.; Behrendt, M.
2018. ISNVH Proceedings 2018. 10th International Styrian Noise, Vibration and Harshness Congress, Graz, A, 20.-22. Juni 2018, SAE International
Behrendt, M.; Landes, D.; Albers, A.
2017. INTER-NOISE - 46th International Congress and Exposition on Noise Control Engineering, Hong Kong, China, 27 - 30 August, 2017
Siegel, A.; Weber, C.; Albers, A.; Landes, D.; Behrendt, M.
2017. Engineering for a changing worldEngineering for a changing world : 59th IWK, Ilmenau Scientific Colloquium, September 11-15, 2017, 110, Universitätsverlag Ilmenau
Siegel, A.; Weber, C.; Albers, A.; Landes, D.; Behrendt, M.
2017. Proceedings of the 21st International Conference on Engineering Design (ICED 17), Vol 4 : Design Methods and Tools, Vancouver, Canada, 21st - 25th August 2017. Ed.: A. Maier, 573–582, The Design Society
Siegel, A.; Weber, C.; Albers, A.; Landes, D.; Behrendt, M.
2017. WInTeSys : Wissenschafts- und Industrieforum Intelligente Technische Systeme, Paderborn, Deutschland, 11-12 Mai 2017
Albers, A.; Landes, D.; Behrendt, M.; Weber, C.; Siegel, A.
2017. WiGeP News, (01/2017), 15
Albers, A.; Behrendt, M.; Landes, D.; Weber, C.; Husung, S.; Siegel, A.
2016. 27th International Conference on Noise and Vibration Engineering, ISMA 2016 and International Conference on Uncertainty in Structural Dynamics, USD2016, Leuven, Belgium, 19. - 21. September, 2016, KU Leuven
Siegel, A.; Weber, C.; Mahboob, A.; Albers, A.; Landes, D.; Behrendt, M.
2016. ASME 2016 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Charlotte, North Carolina, USA, 21 August 2016, V01BT02A055, The American Society of Mechanical Engineers (ASME). doi:10.1115/DETC2016-59872
Albers, A.; Behrendt, M.; Landes, D.; Hettel, R.; Fischer, J.
2016. 45th International Congress and Exposition on Noise Control Engineering: Towards a Quieter Future, INTER-NOISE 2016; Hamburg; Germany; 21 August 2016 through 24 August 2016. Ed. : W. Kropp, 5955–5961, German Acoustical Society
Husung, S.; Siegel, A.; Weber, C.; Müller, B.; Behrendt, M.; Landes, D.; Albers, A.
2015. Wissenschafts- und Industrieforum Intelligente Technische Systeme 2015, 23. – 24. April 2015, Paderborn. Wirtschaft und Wissenschaft auf dem Weg zu Industrie 4.0, Heinz Nixdorf Institut
Behrendt, M.; Landes, D.; Albers, A.
2015. INTER-NOISE 2015. The 44th International Congress and Exposition on Noise Control Engineering, San Francisco, CA, 9 -12 August 2015., INCE
Albers, A.; Landes, D.; Behrendt, M.; Weber, C.; Siegel, A.; Husung, S.
2015. 5. Tagung Fahrzeugakustik : Aktuelle Entwicklungen in der NVH-Berechnung, Essen, Germany, 9. - 10. Juni 2015
Albers, A.; Landes, D.; Behrendt, M.; Weber, C.; Siegel, A.; Husung, S.
2015. Automobil- und Motorentechnik : 17th and 18th March 2015, Stuttgart / 15. Internationales Stuttgarter Symposium. Hrsg.: M. Bargende, 1323–1334, Springer-Verlag. doi:10.1007/978-3-658-08844-6_92
Siegel, A.; Weber, C.; Husung, S.; Albers, A.; Landes, D.; Behrendt, M.
2014. Tagungsband Digital Engineering 2014 - Fraunhofer IFF, 17. IFF-Wissenschaftstage, 24. – 26. Juni 2014. Hrsg. : M. Schenk, 179–186, Fraunhofer Verlag
Siegel, A.; Husung, S.; Weber, C.; Albers, A.; Landes, D.; Behrendt, M.
2014. 58th IWK, Ilmenau Scientific Colloquium, Technische Universität Ilmenau, 8. - 12. September, 2014, Technische Universität Illmenau (TU Ilmenau)
Albers, A.; Landes, D.; Behrendt, M.; Weber, C.; Siegel, A.; Husung, S.
2014. Shaping the Future by Engineering : 58th IWK, Ilmenau Scientific Colloquium, Ilmenau, 8 - 12 September 2014. Ed.: P. Scharff, Universität
Albers, A.; Fischer, J.; Landes, D.; Behrendt, M.
2014. SAE International journal of engines, 7 (3), 1585–1592. doi:10.4271/2014-01-2071
Landes, D.
2014. AAC 2014 : Aachen Acoustics Colloquium, (Aachener Akustik Kolloquium) - Vorkolloquium, Aachen, 24th - 26th November 2014
Übersicht aller Veröffentlichungen
Eine Übersicht aller Veröffentlichungen des IPEK finden Sie hier.