
Erweiterung und Optimierung einer Closed Loop Gesamtfahrzeug-testumgebung
- Subject:Closed Loop, Simulation, Echtzeitsystem, Fahrzeugprüfstand
- Type:Masterarbeit
- Tutor:
Erweiterung und Optimierung einer Closed Loop Gesamtfahrzeugtestumgebung
Thema der Arbeit
Die bestehende Gesamtfahrzeugtestumgebung soll durch einen Fahrroboter erweitert werden, sowie die Synchronisation von Fahrzeuggeschwindigkeit mit der Echtzeitsimulation der Umgebung optimiert.
Hintergrund
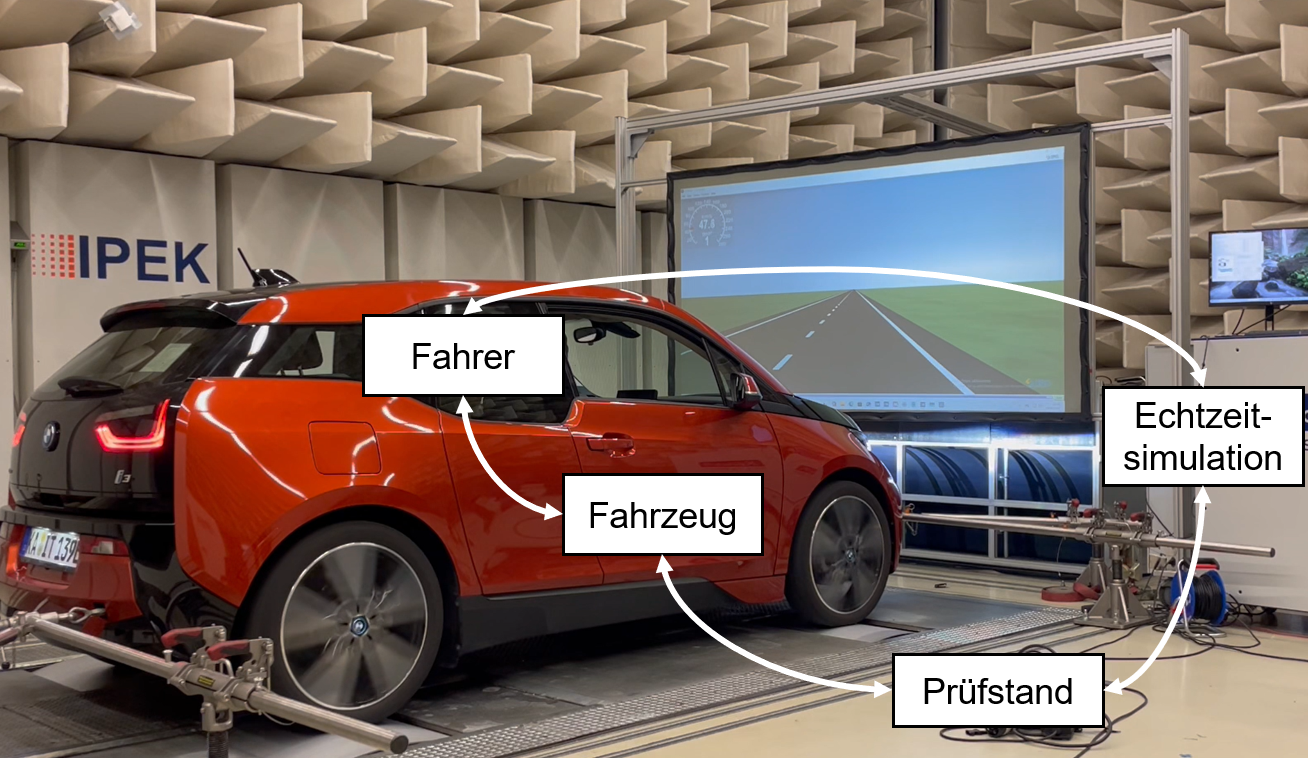
Bei einem Vehicle-in-the-Loop Aufbau wird das Fahrzeug in einer Testumgebung betrieben, die Umgebungseinflüsse wie beispielsweise Fahrwiderstandskräfte am Reifen aufprägt. Dabei werden zwischen dem Prüfstand und der Echtzeitsimulation der Umgebung Signale und Daten ausgetauscht, bzw. synchronisiert. Die Qualität der Synchronisation soll an dem vorliegenden Prüfstand untersucht und verbessert werden. Zusätzlich soll ein Fahrroboter in dem Regelkreis mit integriert werden, so dass es möglich wird Closed-Loop Szenarien mit einer virtuellen Fahrfunktion zu fahren.
Aufgaben
- Einarbeitung in die Funktionsweise des vorliegenden Rollenprüfstands und die Kommunikation mit dem Echtzeitsystem
- Untersuchung der Qualität der Synchronisation der Rollengeschwindigkeit mit der Fahrgeschwindigkeit in der Echtzeitsimulation
- Konzeption und Umsetzung von optimierten Synchronisationsoptionen
- Einbettung eines Fahrroboters im Fahrzeug am Prüfstand zur Ermöglichung von Tests von Closed-Loop Szenarien
- Analyse und Bewertung des Closed-Loop Regelkreises
Das bringst du mit
- Studium im Bereich Maschinenbau, Mechatronik, Wirtschaftsingenieurwesen oder ähnliches
- Vorwissen zu Echtzeitsystemen, Regelungstechnik sind von Vorteil aber nicht zwingend notwendig
- Spaß an der experimentellen und analytischen Arbeit
Interesse geweckt? Dann melde dich mit deinem aktuellen Lebenslauf und Notenauszug bei david.fischer∂kit.edu.